เคยสงสัยกันไหม จิ้งจกไต่ผนังได้อย่างไรโดยไม่ตกลงมา?
สัตว์ตระกูลจิ้งจกและตุ๊กแกมีฝ่าตีนที่ยึดเกาะได้ไม่ใช่ด้วยแรงสุญญากาศ ไม่ใช่เพราะฝ่าตีนเหนียวเหมือนกาว แต่ตีนจิ้งจกเหนือชั้นกว่านั้น
ในสสารอิเล็กตรอนที่อยู่รอบนิวเคลียสกระจายตัวอย่างไม่สม่ำเสมอ แต่ละโมเลกุลของสสารจึงมีบางด้านมีประจุลบ บางด้านมีประจุบวก ด้านที่มีประจุบวกของโมเลกุลหนึ่งก็จะมีแรงดึงดูดยึดเกาะกับด้านที่มีประจุลบของโมเลกุลข้างเคียง แรงดึงดูดระหว่างโมเลกุลนี้คือ แรงแวนเดอวาลส์ ซึ่งเป็นแรงที่สร้างการยึดเกาะให้ตีนจิ้งจก ฝ่าตีนจิ้งจกมีขนขนาดจิ๋วจำนวนนับล้าน ซึ่งจิ้งจกสามารถเปิดปิดแรงยึดเกาะนี้ได้เพียงแค่ออกแรงกดตีนลงไปบนพื้นเพื่อเบนขน
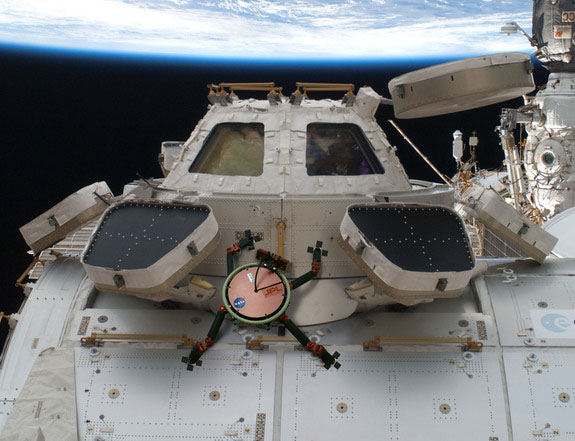
หลักการของตีนจิ้งจกดีเสียจนนาซาต้องลอกเลียนแบบไปทำเป็นตีนหุ่นยนต์ที่วันหนึ่งในอนาคตอาจต้องไปไต่อยู่ภายนอกของสถานีอวกาศนานาชาติเพื่อตรวจสอบสภาพหรือซ่อมแซมบางอย่าง
อารอนพาร์เนส วิศวกรจากเจพีแอลของนาซากล่าวว่า "ในอนาคตเราอาจใช้หุ่นยนต์ติดตีนจิ้งจกไปปฏิบัติภารกิจอื่น ๆ ในวงโคจร เช่นคว้าจับดาวเทียมมาซ่อมแซม หรือเก็บกวาดขยะอวกาศที่กีดขวางให้พ้นทาง"
ตีนจิ้งจกประดิษฐ์ที่เจพีแอลพัฒนาขึ้นนี้ทำงานในแบบเดียวกันมีลักษณะเหมือนฝ่าตีนจิ้งจก มีขนสังเคราะห์ที่เล็กกว่าเส้นผมมนุษย์มากและสร้างแรงยึดเกาะได้ด้วยการออกแรงกดลงไปบนพื้นผิว ตีนจิ้งจกรุ่นล่าสุดที่สร้างขึ้นมารับแรงดึงได้ 150 นิวตัน
ระบบการยึดเกาะแบบนี้มีข้อดีคือไม่เสื่อมสภาพไปตามอายุการใช้งานอย่างเทปกาวและยังทำงานได้ในสภาพแวดล้อมที่โหดร้ายเช่นร้อนจัด หนาวจัด ความดันสูง หรือมีรังสีเข้มข้น
ขณะนี้ได้มีการนำเอาระบบนี้ไปทดลองใช้ในสภาพแรงโน้มถ่วงน้อยที่จำลองขึ้นบนเครื่องบินแล้วและได้มีการนำเอาไปติดไว้ให้แก่ขาของหุ่นยนต์ที่ชื่อว่าลีเมอร์ 3 ซึ่งจากการทดสอบสามารถไต่ไปบนส่วนประกอบที่ทำเลียนแบบแผงเซลสุริยะและส่วนอื่น ๆ ของยานอวกาศได้แล้ว
สัตว์ตระกูลจิ้งจกและตุ๊กแกมีฝ่าตีนที่ยึดเกาะได้
ในสสาร
หลักการของตีนจิ้งจกดีเสียจนนาซาต้องลอกเลียนแบบไปทำเป็นตีนหุ่นยนต์ที่วันหนึ่งในอนาคตอาจต้องไปไต่อยู่ภายนอกของสถานีอวกาศนานาชาติเพื่อตรวจสอบสภาพหรือซ่อมแซมบางอย่าง
อารอน
ตีนจิ้งจกประดิษฐ์ที่เจพีแอลพัฒนาขึ้นนี้ทำงานในแบบเดียวกัน
ระบบการยึดเกาะแบบนี้มีข้อดีคือไม่เสื่อมสภาพไปตามอายุการใช้งานอย่างเทปกาว
ขณะนี้ได้มีการนำเอาระบบนี้ไปทดลองใช้ในสภาพแรงโน้มถ่วงน้อยที่จำลองขึ้นบนเครื่องบินแล้ว